Smash le robot IA quadrupède qui défie les humains au badminton – démo & analyse
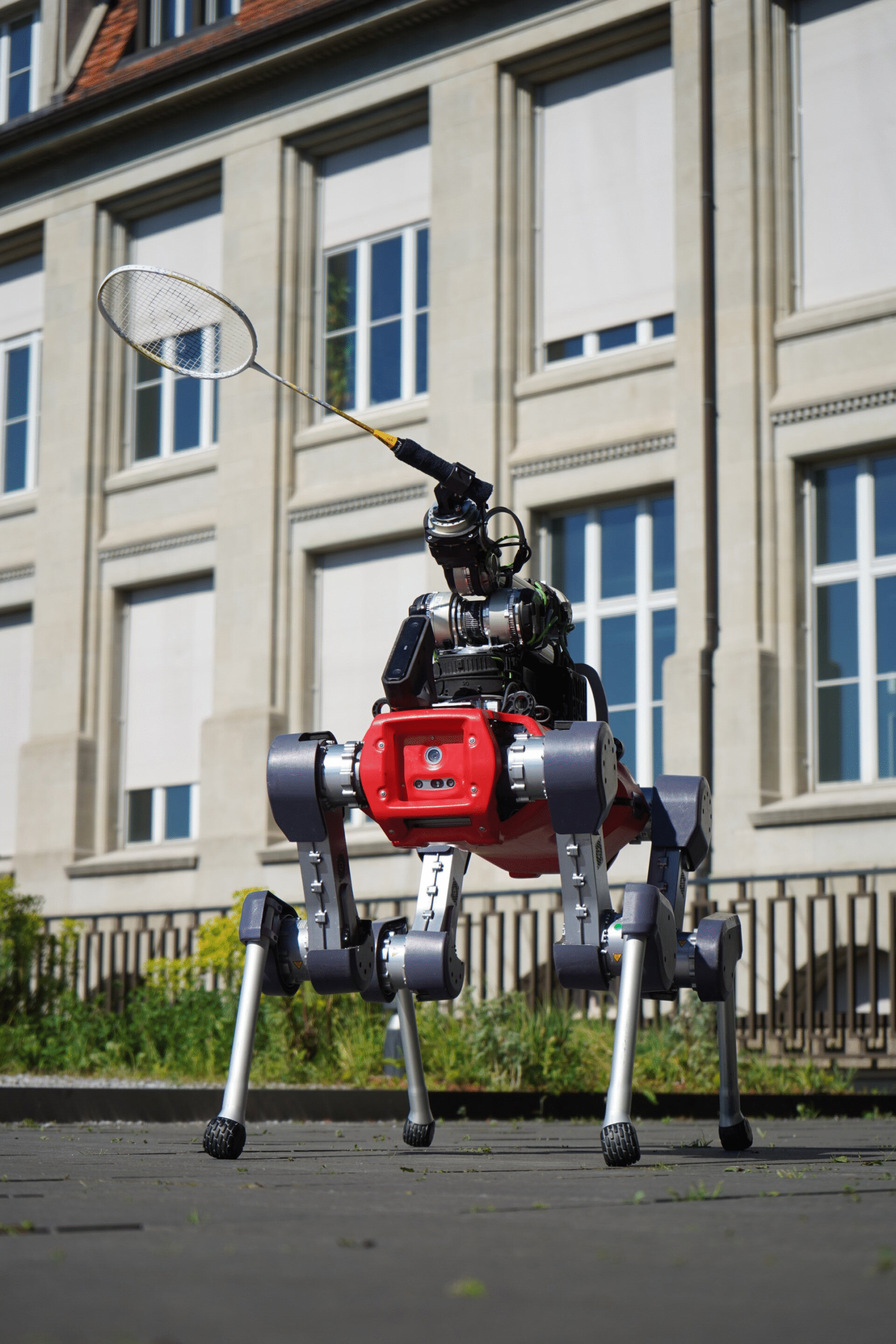
L’intelligence artificielle transforme rapidement de nombreux secteurs. Dans ce contexte, la robotique continue de progresser à une vitesse impressionnante. L’une des innovations les plus marquantes vient récemment de l’ETH Zurich. Une équipe de chercheurs y a développé un robot quadrupède contrôlé par une IA, capable de jouer au badminton contre des humains. Cette prouesse repose sur l’intégration d’une vision avancée, d’une mécanique agile et de l’apprentissage par renforcement. Cet article analyse cette réalisation, son fonctionnement et ses implications.
Contexte du projet
Le badminton est un sport rapide et exigeant. Il implique des réflexes vifs, une bonne coordination œil-main et une grande adaptabilité. Contrairement à des jeux statiques comme les échecs, il impose de réagir à un environnement dynamique. Pour cette raison, les chercheurs de l’ETH Zurich l’ont choisi comme cadre d’expérimentation.
Leur objectif était clair : prouver que l’intelligence artificielle peut s’adapter à des contextes complexes en temps réel. De plus, ils souhaitaient tester un nouveau modèle d’apprentissage applicable à d’autres types de robots.
Une IA qui apprend par essais et erreurs
La technologie principale utilisée dans ce projet est l’apprentissage par renforcement. Ce procédé permet à l’IA d’améliorer ses compétences au fil du temps. En résumé, le robot teste différentes actions, reçoit des récompenses ou des pénalités, puis adapte son comportement en conséquence.
Grâce à cette méthode, le robot a appris à coordonner ses mouvements et à frapper le volant avec précision. Il a ainsi progressé à chaque session d’entraînement. Contrairement aux approches classiques, ce système n’a pas besoin d’un programme figé : il apprend seul, dans un cadre dynamique.
Une vision fiable malgré les perturbations
L’un des points forts du robot est sa perception visuelle. Il utilise une vision par ordinateur avancée, couplée à des caméras rapides et à des capteurs précis. Cela lui permet de suivre le volant et de prédire sa trajectoire avec une grande fiabilité.
Cependant, la véritable innovation réside dans l’introduction d’un modèle de bruit de perception. Ce modèle simule les imperfections réelles des caméras. Il prend en compte les flous, les variations de lumière et autres perturbations visuelles. En intégrant ces contraintes à l’apprentissage, le robot apprend à fonctionner même dans des conditions difficiles.
Comme l’explique Yuntao Ma, chercheur principal du projet : « Nous avons introduit un modèle de bruit de perception qui lie le mouvement du robot à la qualité de perception. Cela permet à l’algorithme d’apprentissage de trouver un équilibre entre agilité et fiabilité. »
Une coordination vision-mouvement efficace
Le robot ne se contente pas de voir, il agit aussi avec précision. Grâce à sa structure quadrupède et à ses membres articulés, il se déplace rapidement sur le terrain. Il ajuste sa position en temps réel pour frapper le volant avec un bras spécialement conçu.
Cette capacité repose sur une coordination fine entre ce que le robot voit et ce qu’il fait. Il doit détecter le volant, calculer la meilleure posture, déterminer l’angle de frappe, puis exécuter l’action rapidement. Ce processus, appelé vision-mouvement, est crucial pour réussir dans un sport aussi rapide.
Quelles applications pour demain ?
Cette innovation dépasse le simple cadre du sport. Les chercheurs envisagent déjà d’adapter ce système à d’autres plateformes robotiques. Cela inclut notamment les robots humanoïdes. Ces avancées pourraient transformer plusieurs domaines d’activité.
Voici quelques exemples concrets :
- Recherche et sauvetage : des robots capables d’évoluer dans des environnements accidentés pourraient intervenir après des catastrophes naturelles.
- Services domestiques : des robots agiles et adaptatifs pourraient effectuer des tâches complexes à la maison.
- Industrie et logistique : l’automatisation de la manipulation d’objets deviendrait plus efficace, même dans des environnements en constante évolution.
Ces robots intelligents pourraient réagir avec souplesse, s’adapter aux imprévus, et travailler aux côtés des humains sans danger. Le badminton n’est qu’un début : cette technologie ouvre la voie à une nouvelle génération de machines autonomes.
Conclusion
L’ETH Zurich a franchi une nouvelle étape dans l’intégration de l’intelligence artificielle à la robotique. En développant un robot capable de jouer au badminton, l’équipe a démontré la puissance de l’apprentissage par renforcement et la pertinence d’un modèle de perception réaliste.
Les résultats sont prometteurs. Ils montrent qu’un robot peut s’adapter, apprendre en continu, et évoluer dans un environnement dynamique. Ces avancées pourraient révolutionner la façon dont nous concevons l’automatisation dans les années à venir.
Demain, les robots capables d’agir et de percevoir comme des humains ne seront plus de la science-fiction. Ils pourraient bientôt jouer un rôle clé dans notre quotidien, que ce soit à la maison, au travail, ou en situation d’urgence.